
Im Rahmen der 48. Hockenheim Classics im September 2025 in Hockenheim führte das Team von x-log Elektronik GmbH in Zusammenarbeit mit der Hochschule Landshut fahrdynamische Messungen an historischen Rennmotorrädern der Deutschen Historischen Motorradmeisterschaft (DHM) durch. Ziel war, das Verhalten klassischer Rennfahrzeuge unter realen Einsatzbedingungen zu analysieren und die Leistungsfähigkeit des kurvX bei besonderen physikalischen Randbedingungen zu evaluieren.
Versuchsaufbau und Fahrzeuge
Die Messungen erfolgten an zwei sehr unterschiedlichen Motorradkonzepten. Beide Fahrzeuge wurden mit kurvX zur Erfassung translationaler und rotatorischer Bewegungen ausgerüstet.
Uhl Stein – GP Rennmotorrad, 50 ccm – technischer Stand 1973
Dieses historische Motorrad ist ein extrem
leichtes, hochdrehendes Einzylinderfahrzeug
mit im Vergleich zu modernen Motorrädern sehr schmalen Reifen und fahrradähnlicher Handlichkeit. Die schmalen Reifen sorgen für ein direkteres, leichtes Einlenkverhalten und einen entsprechend kleinen seitlichen Versatz des Aufstandspunktes.
.


(technischer Stand Mitte der 1960er Jahre
BMW Kneeler Gespann – technischer Stand Mitte 1960er Jahre, modifiziert auf 1000 ccm)
Ein dreirädriges Rennfahrzeug mit asymmetrischer Massenverteilung, flacher Silhouette und hoher Querbeschleunigungsfähigkeit. Gespanne stellen eine Besonderheit dar, weil Fahrer und Beifahrer gezielt durch ihre Bewegungen die Lage des Gesamtschwerpunktes massiv beeinflussen, um möglichst hohe Kurvengeschwindigkeiten zu erzielen.
kurvX zur hochpräzisen Fahrdynamikanalyse
kurvX, entwickelt von der x-log Elektronik GmbH, ist ein autonomer, inertialer Messsensor zur Erfassung von Fahrdynamik und Schräglage. Das System akquiriert kontinuierlich Beschleunigungs- und Winkelgeschwindigkeitsdaten in allen drei Raumachsen. Die Sensorfusion ermöglicht die exakte Charakterisierung des translatorischen und rotatorischen Bewegungszustandes von ein- und mehrspurigen Fahrzeugen (Motorräder und Gespanne).
Die Analyse erfolgt ohne die Notwendigkeit einer Schnittstelle zur Fahrzeugelektronik. Obwohl das System für die Anwendungsbereiche Fahrertraining und Fahrsicherheitsschulungen konzipiert wurde, hat es sich ebenso als valides Forschungsinstrument etabliert. Hierzu zählen die Modellierung individueller Fahrstrategien sowie die Verifikation von Simulationsergebnissen im Rahmen akademischer Kooperationen, beispielsweise in universitären Studien wie KIMoVe.
Montageposition und Schwerpunktlage
Die Montageposition des Sensors spielt bei der Interpretation der Daten eine zentrale Rolle, insbesondere im Hinblick auf die Transformation der gemessenen Beschleunigungen in fahrzeugsymmetrische Koordinatensysteme.
kurvX Montage am 50-ccm GP Rennmotorrad
Die Anbringung des Sensors erfolgte nahezu exakt im Gesamtschwerpunkt des Motorrades. Diese Position stellt eine optimale Referenzebene für die Fahrdynamikanalyse dar, da die ermittelten Messwerte kaum Korrekturen hinsichtlich der Längs- und Querachse benötigen und somit eine höhere Messgenauigkeit gewährleisten.


kurvX Montage am BMW Kneeler-Gespann
Die Sensorik wurde in der vertikalen (z-) und lateralen (y-) Achse nahe dem CoG positioniert, wies jedoch eine deutliche longitudinale (x-) Verschiebung nach vorne auf. Diese Platzierung induziert messbare Trägheitseffekte in den Gier- und Nickraten. Eine algorithmische Korrektur dieser sekundären Trägheitsmomente ist daher für eine präzise Auswertung der Fahrdynamikdaten erforderlich.
Einfluss elektromagnetischer Störgrößen
Ein Teil der Untersuchung diente der Bewertung elektromagnetischer Beeinflussung auf die Sensorik.
Während eine Smartphone-basierte Referenzmessung – mit dem Gerät in der Brusttasche des Fahrers, direkt über dem Motor platziert – massive EMV-Störungen zeigte und das GPS-Signal vollständig verfälscht wurde, blieb das kurvX-System unbeeinträchtigt. Erste Analysen bestätigen, dass das kurvX-Messsystem auch unter intensiver elektromagnetischer Belastung, wie sie durch alte Zündanlagen oder offene Zündkabel entsteht, stabile und konsistente Datensätze liefert.
Messziele und dynamische Fragestellungen
Die wissenschaftlichen Fragestellungen differierten je nach Fahrzeugtyp: Die gewonnenen Messdaten bilden die Grundlage für die Weiterentwicklung der Algorithmen. Diese erlauben es, mittels der erfassten translatorischen und rotatorischen Bewegungen präzise Rückschlüsse auf die Fahrprofile, verfügbaren Stabilitätsreserven und physikalischen Grenzzustände des jeweiligen Fahrzeugs zu ziehen.
50 ccm GP-Rennmotorrad:
- Ermittlung der maximal erreichbaren Schräglagen.
- Untersuchung der fahrdynamischen Charakteristik eines ultraleichten Motorrads mit geringer Eigenmasse und minimalen Rollwinkeln.
- Ableitung von Modellen zur Interpretation „fahrradähnlicher“ Kurvenverhaltens im Grenzbereich.
BMW-Kneeler-Gespann:
- Bestimmung der realen lateralen Querbeschleunigungen in Rechts- und Linkskurven.
- Analyse der Asymmetrien in der Fahrzeugdynamik.
- Bewertung des individuellen Lern- und Anpassungsverhaltens des Fahrers über mehrere Messfahrten hinweg („1. – 3. Lauf“).

Ergebnisse und initiale Datenauswertung
Die Auswertung der ersten Messläufe mit dem kurvX-System liefert spezifische Einblicke in die jeweilige Fahrdynamik der ungleichen Testfahrzeuge und identifiziert die Notwendigkeit zur Anpassung der Analysemodelle:
50 ccm GP-Rennmotorrad
- Die Analyse bestätigte die geometrisch bedingten Limitationen: Die gemessenen maximalen Schräglagewinkel und die resultierenden lateralen Beschleunigungen blieben im moderaten Spektrum.
- Die registrierte Bewegungscharakteristik verifiziert die fahrradähnliche Dynamik, wodurch konventionelle, auf hohe Schräglagen ausgelegte Fahrdynamikmodelle nur eingeschränkt anwendbar sind.
- Zur objektiven Performanzbewertung ist somit die Implementierung einer angepassten Interpretationslogik erforderlich, welche die spezifischen geometrischen Restriktionen des Fahrzeugs berücksichtigt.
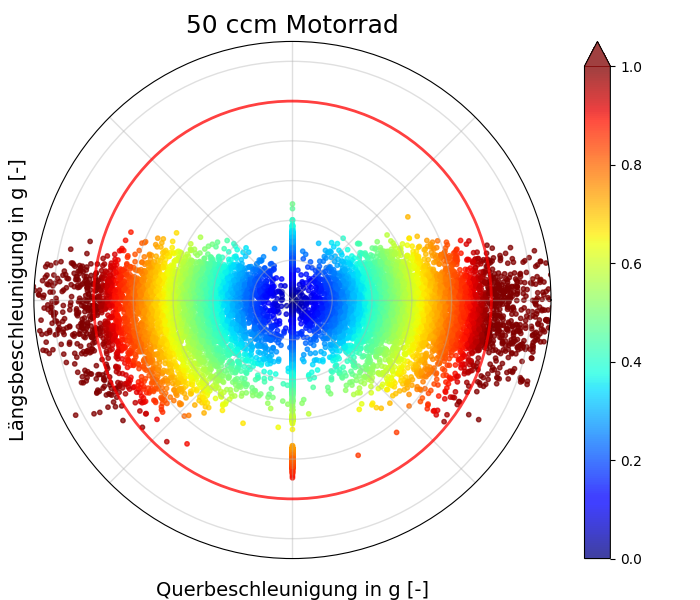
Kamm’scher Reibkreis des 50 ccm GP Rennmotorrades. Visualisierung der simultanen Ausnutzung von lateraler (Quer-) und longitudinaler (Längs-) Beschleunigung (ay vs. ax) über den gesamten Messzyklus.
BMW Kneeler-Gespann
- Die Daten dokumentieren deutlich höhere Querbeschleunigungswerte und eine starke dynamische Diskrepanz zwischen Rechts- und Linkskurven.
- Diese ausgeprägte Fahrzustandsasymmetrie ist ein direktes Resultat der asymmetrischen Massenverteilung und der aktiven, ladungsabhängigen Gewichtsverlagerung durch Fahrer und Beifahrer.
- Die zeitliche Progression der Messwerte über die verschiedenen Läufe hinweg deutet auf ein messbares Lern- und Anpassungsverhalten des Teams hin, dessen statistische Signifikanz durch erweiterte Versuchsserien validiert werden soll.
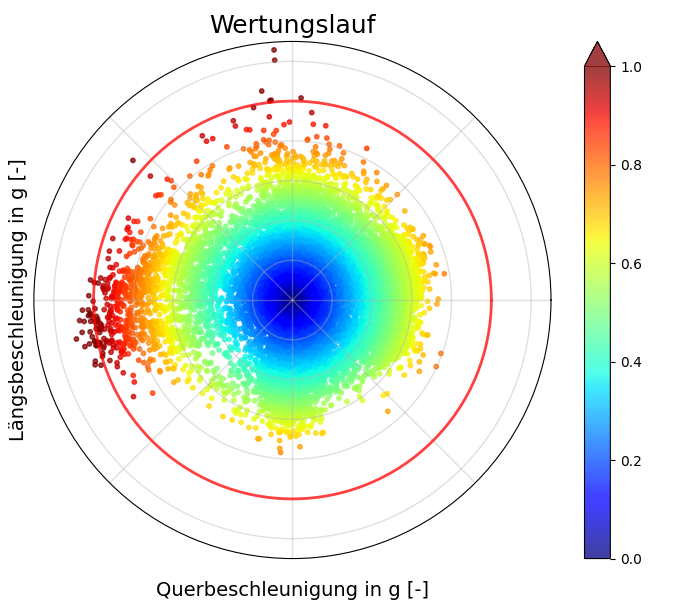
Kamm’scher Reibkreis des Gespanns: Die asymmetrische Verteilung der Beschleunigungsdaten belegt die starke dynamische Diskrepanz zwischen Rechts- und Linkskurven.
Gespann-Dynamik: Asymmetrie und Lernkurve in der Querbeschleunigungsanalyse
Die vorliegenden Grafiken visualisieren die statistische Dichteverteilung der lateralen Beschleunigung über die drei durchgeführten Läufe. Die unterschiedliche Form und Lage der Kurven visualisiert direkt die deutliche Verschiebung des operativen Fahrdynamik-Limits im Zeitverlauf.
Analyse der Rechtskurven-Verteilung
- Lerneffekt und Steigerung: Es ist eine deutliche Verschiebung der Verteilung zu höheren Querbeschleunigungswerten (nach rechts) zu erkennen. Die Wertungsfahrt (Grün) demonstriert die höchste Ausnutzung des Limits, wobei der Verteilungsschwerpunkt bei der höchsten Beschleunigung liegt (≈4.8 m/s2).
- Performance-Gewinn: Der Abstand zwischen Training 1 (Blau) und der Wertungsfahrt (Grün) im rechten Bereich der Kurve ist signifikant. Dies ist ein Indikator für das messbare Lern- und Anpassungsverhalten der Crew, die in den nachfolgenden Läufen höhere Kurvengeschwindigkeiten und damit höhere laterale Belastungen realisieren konnte (die Kurvenscheitelpunkte wandern von ca. 4.5 m/s2 auf ca. 4.8 m/s2).
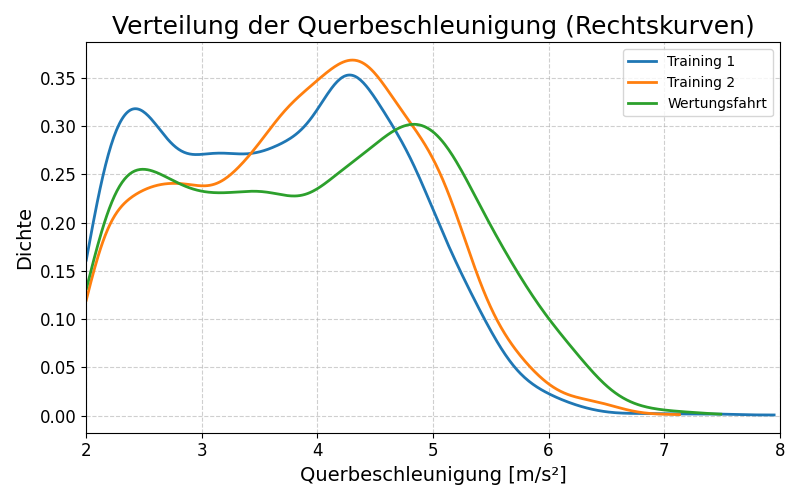
Die Grafik für die Rechtskurven (positive Querbeschleunigung) zeigt eine klare Entwicklung des Fahrverhaltens über die Messläufe hinweg:
Analyse der Linkskurven-Verteilung
- Erhöhung des fahrdynamischen Limits: Die Wertungsfahrt (Grün) zeigt, dass durch die aktive Positionsverlagerung des Beifahrers die fahrdynamischen Reserven weiter ausgeschöpft werden konnten. Dies führte zu einer verbesserten Gesamt-Schwerpunktslage des Gespanns.
- Limitierung durch Haftreibung: In Linkskurven ist – im Vergleich zu Rechtskurven – nicht der Beifahrer der begrenzende Faktor, sondern die verfügbare Haftreibung. Dadurch konnten insbesondere im Bereich hoher Querbeschleunigungen kaum zusätzliche Leistungssteigerungen erzielt werden.
- Homogener Verlauf der Dichteverteilung: Der Verlauf der Dichteverteilung über der Querbeschleunigung ist deutlich homogener als in Rechtskurven. Die Verteilung nimmt mit steigender Querbeschleunigung gleichmäßig ab, was auf einen gleichmäßigeren Aufbau der Querbeschleunigung hindeutet.
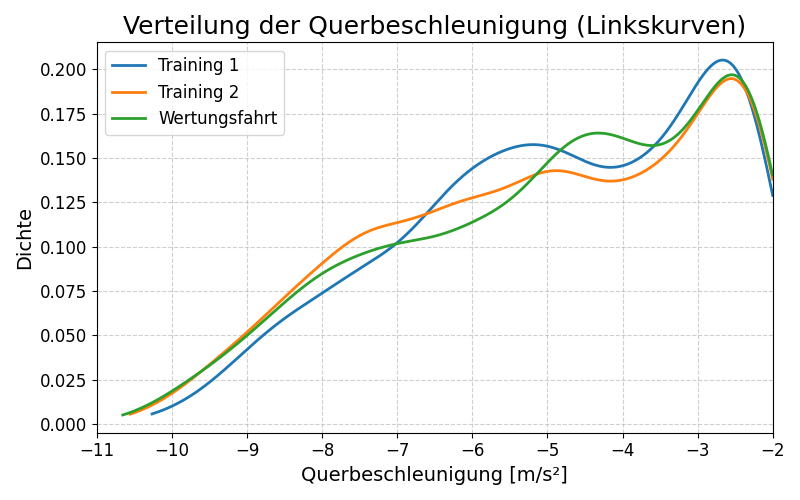
Diese Grafik zeigt die statistische Dichteverteilung der Querbeschleunigung in den Linkskurven. Das dynamische Fahrverhalten weist im Vergleich eine geringere Veränderung über die Messläufe hinweg auf.
Wissenschaftliche Leitung und beteiligte Akteure
Die gesamte Messkampagne wurde von Alexander Schön, wissenschaftlicher Mitarbeiter und Doktorand der Hochschule Landshut, initiiert und vor Ort begleitet. Alexander Schön übernahm dabei nicht nur die Versuchsplanung und Datenerfassung, sondern war auch als Beifahrer (Monkey) im BMW-Gespann aktiv an der Datengenerierung beteiligt.
Als zentraler Akteur und Eigentümer der Rennfahrzeuge fungierte Prof. Dr.-Ing. Manfred Strohe (Hochschule Landshut) als Fahrer sowohl des Rennmotorrads als auch des Gespanns. Prof. Strohe ist an der Hochschule Landshut in der Fakultät Maschinen- und Bauwesen tätig und verantwortet dort die Bachelor- und Masterstudiengänge der Automobiltechnik. Zu seinen Lehrgebieten gehören u. a. Akustik und Schwingungstechnik sowie Karosserietechnik/Leichtbau. Durch diese Expertise ist Professor Strohe federführend in die thematische Ausrichtung Motorsport und Zweiradtechnik der Hochschule Landshut eingebunden.



Organisatorische Einbindung und Kontext
Die durchgeführte Messkampagne basiert auf einer direkten Forschungskooperation zwischen der Hochschule Landshut und der x-log Elektronik GmbH und ist in die laufenden Forschungsaktivitäten zur motorradspezifischen Fahrdynamikerfassung eingebettet. Die gewonnenen experimentellen Erkenntnisse vom Hockenheimring dienen als Validierungsdatensatz und experimentelle Ergänzung für das Forschungsprojekt KIMoVe („KI-basierte Feedback-Funktion für das Fahrverhalten mittels erfasster Fahrdynamikdaten eines Motorrads“).
Fazit und Ausblick
Das DHM-Event am Hockenheimring lieferte den empirischen Beleg, dass das kurvX-System auch unter anspruchsvollen Einsatzbedingungen präzise Messdaten generiert. Insbesondere wurde bestätigt, dass die Sensorik auch in Umgebungen mit hohen EMV-Störpegeln, bei ungewöhnlichen Fahrzeuggeometrien und unter komplexen Fahrdynamikzuständen zuverlässig arbeitet.
Darüber hinaus zeigte diese Messkampagne beispielhaft die Vielfalt der Anwendungsbereiche für die erfassten Daten – von der Analyse historischer Rennfahrzeuge bis hin zur Entwicklung neuer Fahrer-Feedback-Systeme. Vor allem aber beweist sie, dass hinter den Messungen eine gemeinsame Leidenschaft steckt: die für Motorräder, für Technik und für innovative Forschung. Wir sind neugierig und motiviert, die Grenzen der Zweirad-Dynamik wissenschaftlich neu zu definieren und unsere Erkenntnisse direkt in die Praxis zu überführen.
Weiterführende Informationen
Da dieser Beitrag spezifische Projekte und Kooperationen nennt, haben wir die wichtigsten Links zusammengefasst.
Projekt KIMoVe: Link zur offiziellen Projektseite
x-log Elektronik GmbH: Link zur Unternehmensseite
Hochschule Landshut: Link zur Hochschulwebsite
kurvX: Link zur kurvX Website, Link zur kurvX4trainer Website
Deutsche Historische Motorrad Meisterschaft: Link zur Website/über uns
Bilder: Alexander Schön, Manfred Strohe, Magnus Gwerder
